The 2023 edition of the Photogrammetric Computer Vision workshop was held in conjunction with the CVPR conference in Vancouver, Canada on 19th June, 2023.
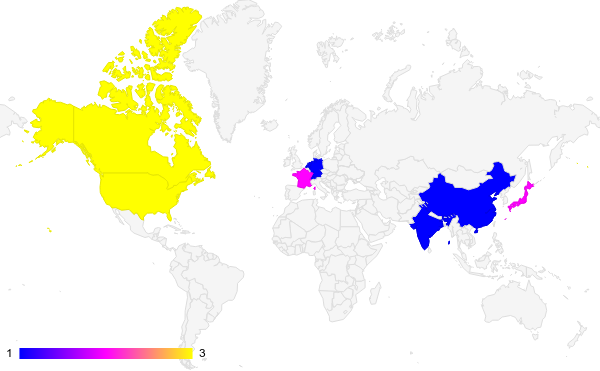
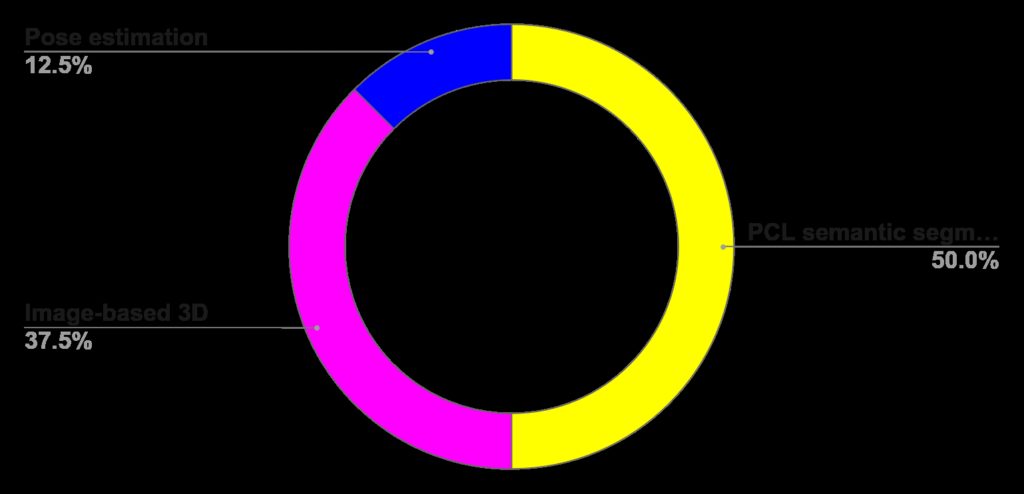
The workshop was preceded by a call for papers. We received 16 submissions and accepted 8 for publication in the CVF open access repository. The review process was double-blind, each paper was reviewed by at least two experts selected from the scientific committee, and accompanied by a concise meta-review issued by the organisers. The submissions originated from several countries including the USA, Canada, France, Japan, China, India and Germany (see Figure 1). The accepted papers covered three main topics: point cloud semantic segmentation, image- based 3D reconstruction, and camera pose estimation (see Figure 2).
The half-day workshop was organised in two sessions, separated by a coffee break and poster session. Three invited keynote speakers highlighted the event: Konrad Schindler (ETH-Zurich), Federica Arrigoni (Politecnico di Milano) and Derek Lichti (University of Calgary). Konrad Schindler talked about large-scale and high resolution depth estimation through probabilistic fusion of elevation models with Sentinel-1 and Sentinel-2 images. Federica addressed the solvability of Structure from Motion by analysing the camera viewing graph, while Derek Lichti’s focus was on metrology and terrestrial laser scanner viewpoint planning. All accepted papers were given an 8-minute oral slot and the authors were encouraged to participate in the poster session. Unfortunately, various circumstances made it impossible for 4 speakers to reach Canada thus they presented from remote.
The workshop was supported by the International Society for Photogrammetry and Remote Sensing and the Société Française de Photogrammétrie et de Télédétection. Hexagon sponsored the event and was physically present at the workshop. The donation allowed to establish a best paper award which was revealed by the organisers and unanimously granted to:
DeFlow: Self-Supervised 3D Motion Estimation of Debris Flow by Liyuan Zhu, Yuru Jia, Shengyu Huang, Nicholas Meyer, Andreas Wieser, Konrad Schindler, Jordan Aaron
We thank everyone who contributed to PCV2023 and are looking forward to future editions.
Organizers
Ewelina Rupnik (LaSTIG, UGE, IGN-ENSG)
Ronny Hänsch (DLR)
Mozhdeh Shahbazi (NRCanada)
Jianzhu Huai (Wuhan University)
Rongjun Qin (The Ohio State University)